|
Hello! I am an ELLIS PhD Student advised by Professor Wolfram Burgard and co-advised by Professor Cordelia Schmid. My research interests span a lot of fields but broadly I work on building robust models for robot perception across multiple modalities - vision, language, sonar, audio etc. and their use in downstream applications such as robot navigation. I am a graduate of Carnegie Mellon University where I was fortunate to be a part of the Robot Perception Lab. At CMU, I worked on Underwater Perception and Object SLAM. I was also a Robotics Software Engineer at a startup where I worked on the localization stack for a mobile robot system. Before that I interned with Jupiter's Data Science team, focusing on NLP for FAQ search and user behavior analytics. Additionally, I contributed to the EqWATER project at IISc, specializing in leak detection for smart water distribution systems. I've also gained valuable experience as an Area Manager Intern at Amazon. Email / CV / Google Scholar / Github / Linkedin |

|
|
|
* denotes equal contribution |

|
Abhijeet Nayak*, Débora N.P. Oliveira*, Samiran Gode*, Cordelia Schmid, Wolfram Burgard ICRA, 2026 IROS Workshop on Generative AI for Robotics and Smart Manufacturing, 2025 ( Best Poster) arXiv / Website
- Designed a network to predict the scaling factor for generative navigation policies to create metric waypoints in the real-world |

|
Samiran Gode*, Abhijeet Nayak*, Débora N.P. Oliveira*, Cordelia Schmid, Wolfram Burgard IROS, 2025 CoRL Workshop on Learning Effective Abstractions for Planning (LEAP), 2024 CoRL Workshop on Differentiable Optimization Everywhere: Simulation, Estimation, Learning, and Control, 2024 arXiv / Website
- Used Conditional Flow Matching(CFM) along with depth embeddings for efficient goal-conditioned robot navigation as opposed to diffusion policies |
|
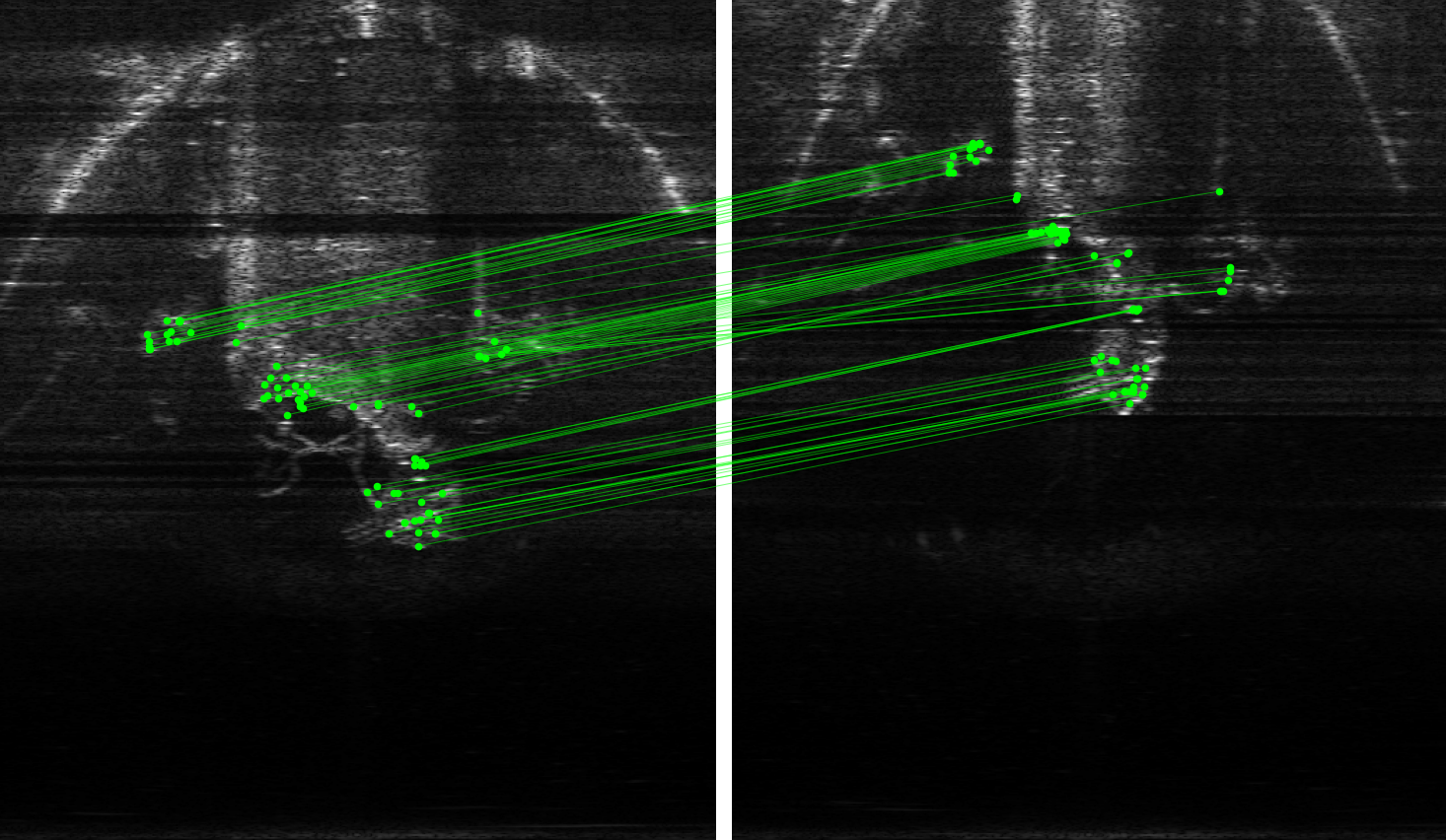
Samiran Gode*, Akshay Hinduja*, Michael Kaess ICRA, 2024 2nd Advanced Marine Robotics TC Workshop IROS, 2023 arXiv / Code
- Solved data association for underwater SLAM through a novel method for sonar image correspondence using Learned Features. |
|
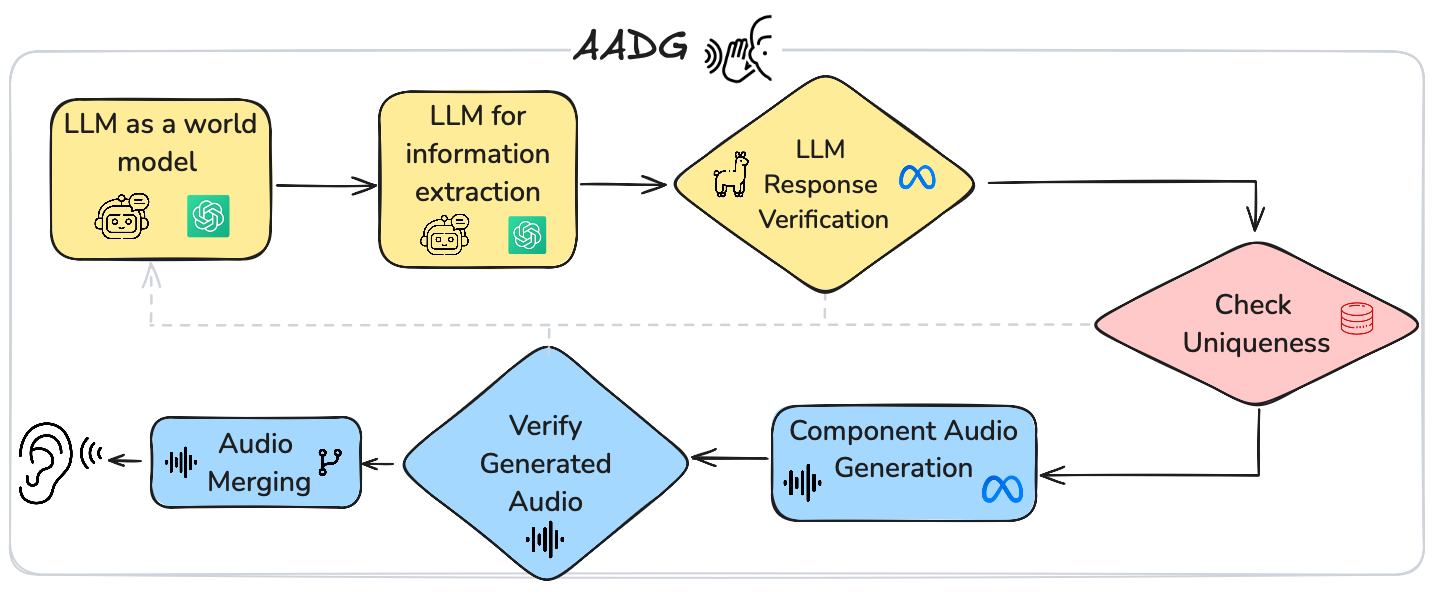
Ksheeraja Raghavan*, Samiran Gode*, Surabhi Raghavan, Ankit P Shah, Wolfram Burgard, Bhiksha Raj, Rita Singh, ICLR Workshop on "Will Synthetic Data Finally Solve the Data Access Problem?", 2025 Openreview / Website
- Developed a novel audio generation framework (AADG) using LLMs and text-to-audio models to simulate realistic scenarios specifically for Audio Anomaly Detection and Localization. |

|
Samiran Gode, Supreeth Bare, Bhiksha Raj, Hyungon(Clay) Yoo AI Magazine The AAAI 2023 Second Workshop on AI for Credible Elections Journal / arXiv / Code
- Finetuned Longformer on a scraped Wikipedia dataset to find most important tokens based on attention score. |
|
- Implemented on Object based semantic SLAM, created low-memory metric semantic maps for multi-robot communication. |
|
Samiran Gode, Sheetal Kumar K R, Sindhu H J, P G Prasad, M S Mohan Kumar, Rajesh Sundaresan,
- Developed an algorithm for detecting and localizing multiple leaks in Water Distribution Systems with Intermittent water
supply for Bengaluru a city of 8.5mil.(As part of EqWATER funded by Ministry of Human Resources Development, Govern-
ment of India). |
|
|
|
- Camera Localisation on the ICL-NUIM dataset using Iterative Closest Point Algorithm. |

|
Code
- Implemented a Differentiable Renderer for emission-absorption volumes. |
|
- Monte Carlo Localization(MCL) based robot localization for an indoor robot using laser rangefinder and odometry. |

|
Learning 3D representations using single views. |
|
Thank you to Jon Barron for the website template! |